This step performs a motion correction of the dynamic PET series.
Use the + tab to add an third processing tab and select Motion Correction from the tool list.
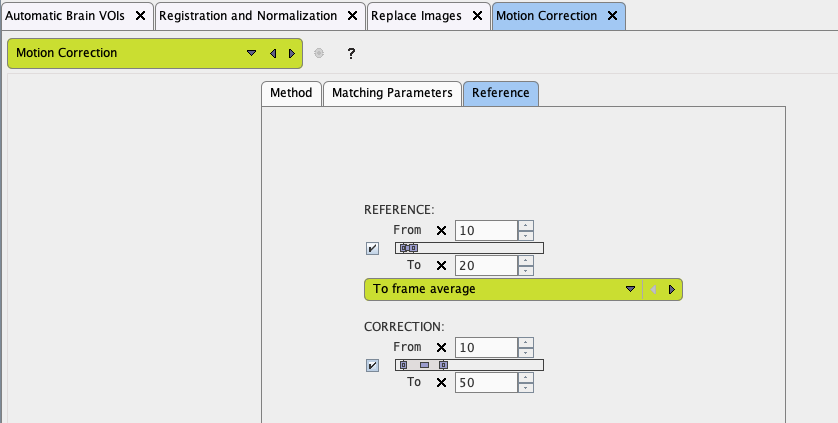
Make sure that the To frame average is selected for the REFERENCE. With this approach, a reference image is created by averaging the frames between From and To. In this example a range from 10 to 20 is applied, omitting the noisy short frames at the beginning. Note that the same range had been averaged to create a reference for the registration between PET and MR. In this way, the transformation will correctly map from MR to the motion corrected PET.
The CORRECTION section specifies the frames which will be matched to the frame average which serves as the reference. Assuming that there was negligible motion in the initial frames, a range from 10 to 50 is specified. Note that as a convenience the end number can be higher than the number of frames in the actual series.